Joshua Ott
Autonomous Systems Researcher
Stanford University
About Me
My work focuses on building intelligent autonomous agents that are capable of exploring unknown environments. My research lies at the intersection of applying Convex Optimization, POMDPs, and deep reinforcement learning to push the boundaries of Artificial Intelligence to solve complex, real-world challenges in autonomy.
I completed my Ph.D. in the Stanford Intelligent Systems Laboratory (SISL) advised by Professor Mykel Kochenderfer, where my work primarily revolved around decision-making under uncertainty for autonomous systems. I have worked in collaboration with NASA JPL, where I was a visiting researcher for the autonomous planning team competing in the DARPA Subterranean Challenge, as well as with NASA Ames, working on the VIPER mission to the lunar South Pole.
Projects
Informative Path Planning
Informative path planning library with various solution methods ranging from exact mixed integer program solutions, to learning-based approaches, to approximate heuristics.
Envelope Expansion
Physics-informed Gaussian processes for Safe Envelope Expansion using real T-38 data in collaboration with the USAF Test Pilot School.
Informative Input Design
Informative input design for dynamical systems. Features examples in X-Plane, Aerobench and WaterLily.jl simulators.
Trajectory Optimization
Trajectory Optimization for Adaptive Informative Path Planning with Multimodal Sensing.
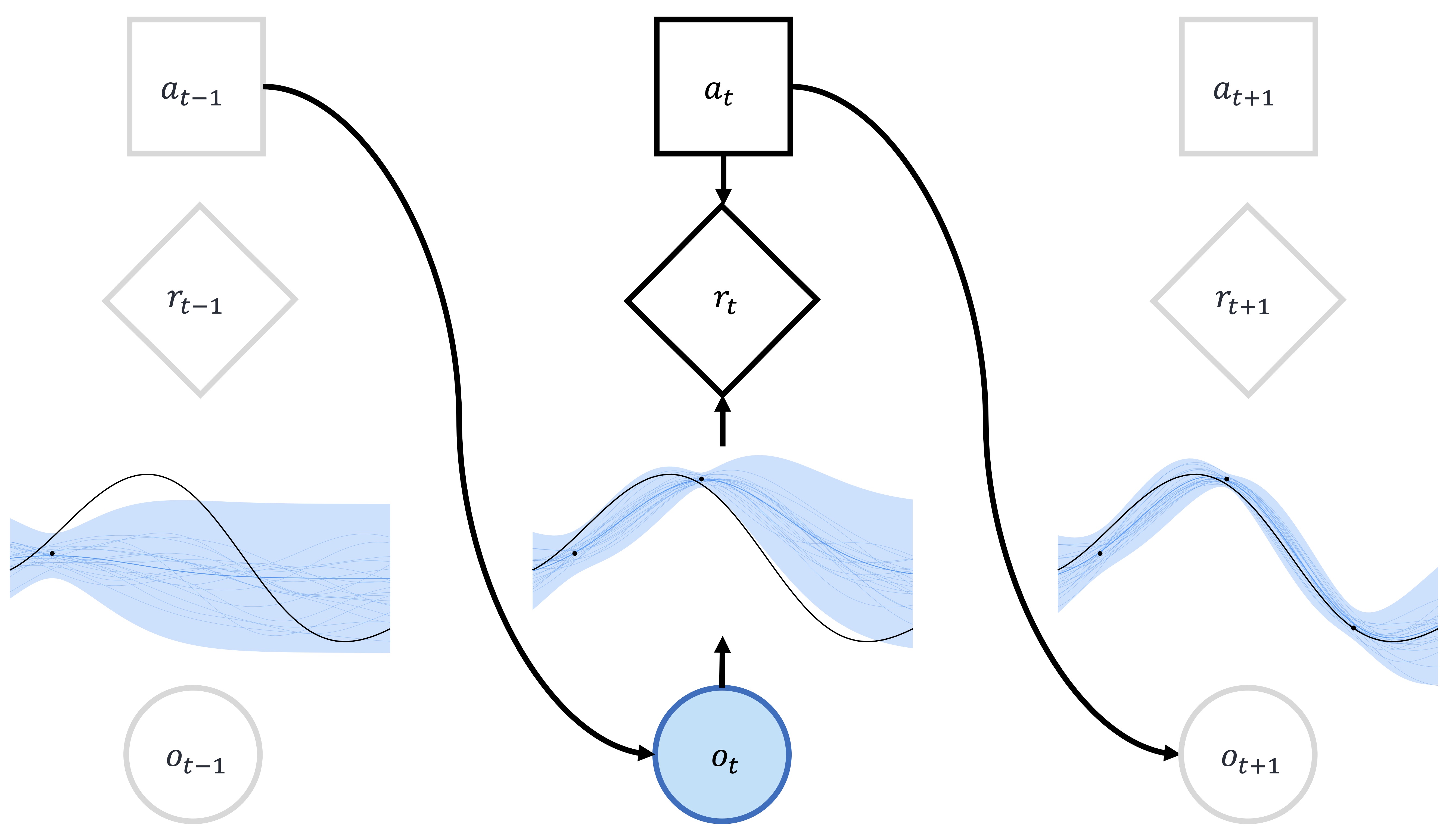
Sequential Bayesian Optimization
Sequential Bayesian Optimization for Adaptive Informative Path Planning with Multimodal Sensing.
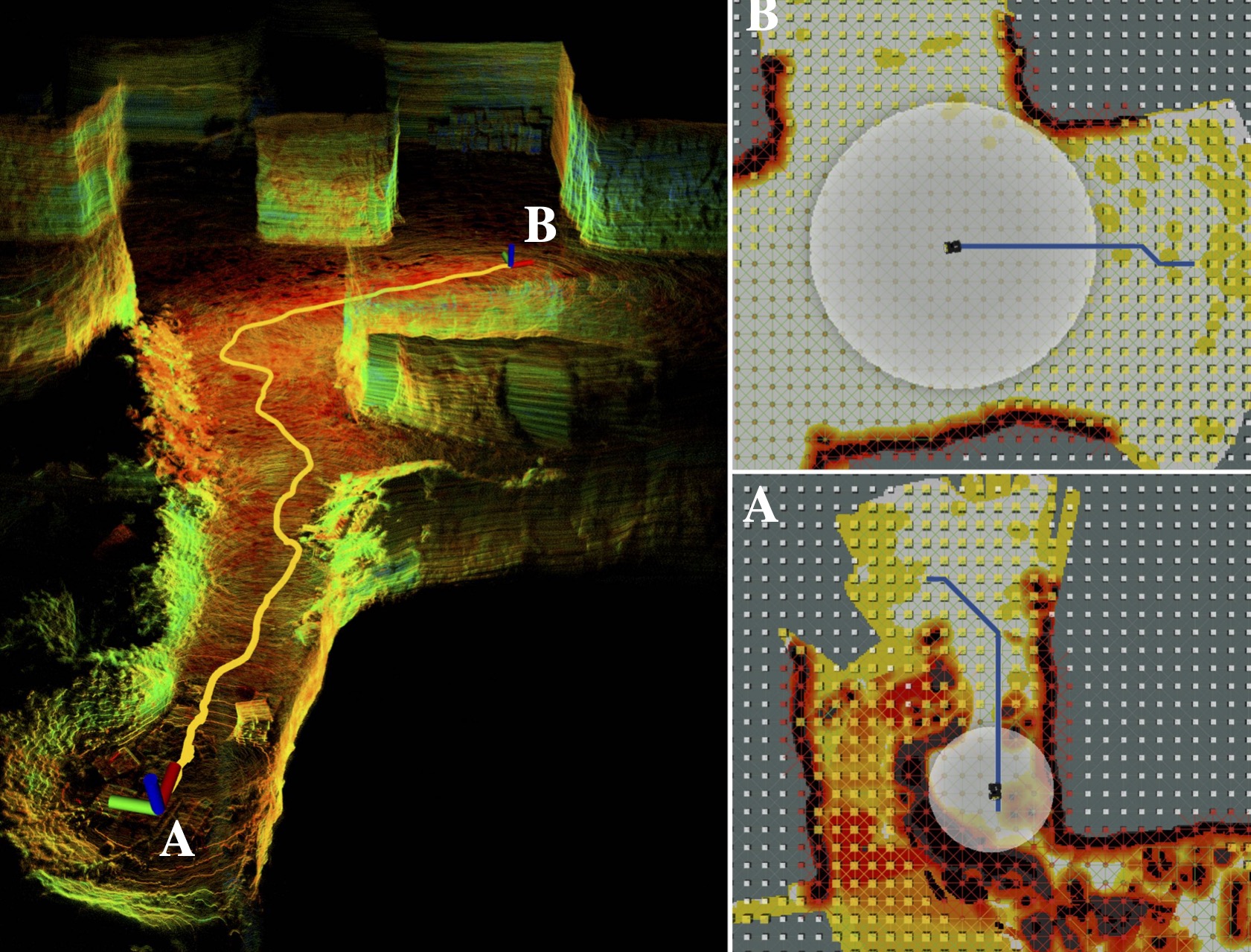
Adaptive Coverage Path Planning
Adaptive Coverage Path Planning for Efficient Exploration of Unknown Environments.

Risk-aware Meta-level Decision Making
Risk-aware Meta-level Decision Making for Exploration Under Uncertainty.
Lectures
Online Planning and Policy Search (Stanford AA228/CS238)
Policy Gradient Estimation and Optimization (Stanford AA228/CS238)
Linear Constrained Optimization (Stanford AA222/CS361)
Probabilistic Surrogate Optimization (Stanford AA222/CS361)
Other
Thesis Defense